En las dos últimas décadas y media, el mercado de la observación de la Tierra por satélite ha aumentado considerablemente. Si bien las imágenes ópticas siguen siendo una alta prioridad, la importancia del Radar de Apertura Sintética (SAR) se ha vuelto innegablemente importante en los últimos 15 años – una tendencia que se basa en mejoras continuas de la tecnología y más proveedores sumándose a la ecuación.
Con los satélites de alta precisión y resolución #TerraSAR-X y #TanDEM-X, Airbus está a la vanguardia de este desarrollo desde 2007. En 2018 se lanzó su satélite asociado español #PAZ (Hisdesat). Juntos, los tres satélites forman su constelación #Radar.
Recientemente sacaron "Tutorial SAR" – una miniserie de publicaciones en redes sociales, totalmente enfocada en el SAR espacial. Ha sido creado para (futuros) usuarios de SAR que actualmente tienen poca o ninguna experiencia con esta increíble tecnología y nos complace compartir con nuestra red su versión en español a través de nuestros canales. Es una introducción fácil de digerir y actuará como una guía de referencia, destacando los principios básicos de la teledetección basada en Radar, apoyada por algunos ejemplos de imágenes sobresalientes.
Dicho esto, por favor, disfruten de esta miniserie, empezando con el primer episodio.
Episodio 1: Básicos de SAR
A diferencia de cualquier sistema óptico pasivo, los sensores SAR no requieren iluminación externa (luz solar) para recopilar datos (útiles). Al ser un sistema llamado 'activo', Radar proporciona su propia fuente de energía para iluminar el área de interés y objetivos – permitiendo adquirir datos completamente independientes de la luz del día o las condiciones meteorológicas.
Un sistema de percepción remota por Radar se basa en tres funciones principales:
- La transmisión de la señal de microondas del radar al suelo en su longitud de onda específica (en el caso de la constelación de radar de Airbus es Banda-X).
- Recepción de una porción de la energía transmitida como retrodispersión de la superficie terrestre.
- El procesamiento de la señal devuelta en una imagen, alternativamente un producto de monitoreo o medición a medida, considerando la intensidad de la señal y el tiempo de retardo.

Esta imagen de modo Staring SpotLight de resolución submétrica se ha adquirido en Tórshavn, Islas Feroe, que se considera la ciudad número uno en el mundo que recibe la menor cantidad de luz solar. Como de costumbre, la imagen de la Constelación de Radar es clara y nítida y no se ve afectada por estas condiciones.
Episodio 2: Modos de adquisición y resolución
La Constelación de Radar de Airbus ofrece seis diferentes modos de adquisición (o configuraciones de satélite) que van desde resolución submétrica para el monitoreo de puntos calientes hasta cobertura de una gran área a una resolución decente beneficiando servicios como la vigilancia marítima.
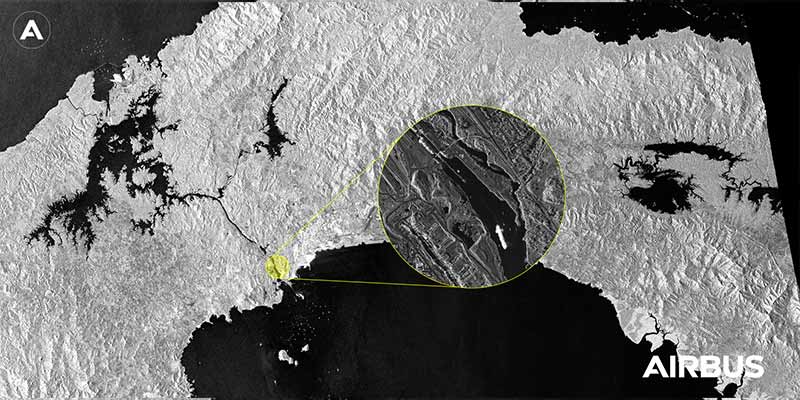
La imagen de hoy proporciona...
- una vista general del Lago Gatun al Norte y el Golfo de Panamá al Sur, con la famosa ruta de envío del Canal de Panamá casi centrada en esta imagen de Wide ScanSAR y,
- un primer plano del canal capturado con el modo Staring SpotLight de resolución submétrica que proporciona un nivel de detalle muy alto.
La Constelación de Radar de Airbus ofrece una amplia gama de coberturas de resolución y área, siendo la caja de herramientas perfecta para una amplia variedad de aplicaciones.
Episodio 3: Sombra de Radar
Esta imagen de la Constelación de Radar en Teotihuacán, México, muestra perfectamente la llamada 'Sombra de Radar'.
Mientras que las sombras en las fotografías son bastante obvias, también hay porciones en las imágenes de radar que pueden ser sujetos a sombra.
El satélite de radar siempre está mirando de lado hacia la pirámide - en este caso desde el lado derecho, ya que está midiendo las diferencias de tiempo de ejecución de la señal para colocar correctamente los píxeles a través de la imagen. Los lados de las pirámides que dan al sensor parecen ser más brillantes debido a los retornos significativos de la señal, mientras que el lado opuesto de ambos templos parece mucho más oscuro (= sombra de radar), debido a la falta / pequeños retornos de la señal que vuelve al sensor. Esto es especialmente valioso para cualquier interpretación del terreno o de cualquier objeto alto, ya que añade información de altura al análisis e incluso se puede utilizar para generar modelos 3D.

Una sombra de radar ocurre cuando el haz de radar no es capaz de iluminar la superficie del suelo, específicamente detrás de objetos u otras características verticales o pendientes con lados empinados. Una sombra de radar nítida puede derivar información de altura o, en otros casos, puede ayudar a identificar la forma de un objeto específico.
Episodio 4: Layover
De manera similar a las distorsiones encontradas al usar cámaras, las imágenes de radar también están sujetas a distorsiones geométricas debido al desplazamiento en relieve.
Este fenómeno "layover" siempre ocurre cuando un haz de radar alcanza la parte superior de un objeto (p.ej. un edificio alto como se muestra en esta imagen) antes de que llegue al suelo. El reflejo de la parte superior del edificio se recibe de nuevo en el sensor antes de la de la parte inferior del edificio. En la imagen, los edificios parecen estar 'inclinados' hacia el sensor y están tendidos sobre o a través de sus bases reales. La llamada "layover" es útil para obtener una visión clara de la estructura de los edificios, contar el número de pisos e incluso calcular la altura del objeto.
Este fenómeno debe tenerse en cuenta al analizar las imágenes de radar, específicamente con respecto a objetos altos o terrenos escarpados. Al hacerlo, se puede obtener información adicional (p. ej., altura, estructura detallada del objeto).
.jpg)
Esta es una imagen tomada por la Constelación de Radar de Airbus en el modo Staring SpotLight de resolución submétrica del centro de Honolulu, Hawaii.
Episodio 5: Retrodispersión
Los sensores de radar siempre miran hacia el suelo a un ángulo de incidencia específico y seleccionable. Esto provoca un aspecto 3D del área debido a la sombra del radar y los efectos de la escala (ver Episodios 3 y 4 para más información). Al mismo tiempo, todos los objetos y materiales en el suelo tienen una rugosidad superficial diferente en relación con la longitud de onda del sensor, lo que conduce a un comportamiento diferente en la reflexión de la señal. Esto finalmente causa los tonos individuales de gris en las imágenes de radar (también llamada intensidad):
- Las superficies lisas (p. ej., pistas de aterrizaje de aeropuertos, áreas de estacionamiento, superficies de aguas tranquilas) parecerán oscuras o negras.
- Los píxeles brillantes se encuentran a menudo en áreas urbanas, en objetos metálicos o en las orillas de ríos y lagos.
- Los bosques mostrarán un lado brillante donde está frente al radar y un borde más oscuro en el lado opuesto.

Una sola imagen de radar tiene aproximadamente 65.000 tonos diferentes de gris que representan información estructural como objetos o superficies.
Esta imagen ha sido recolectada en Baviera, Alemania con el modo de toma SpotLight.
Episodio 6: Polarización
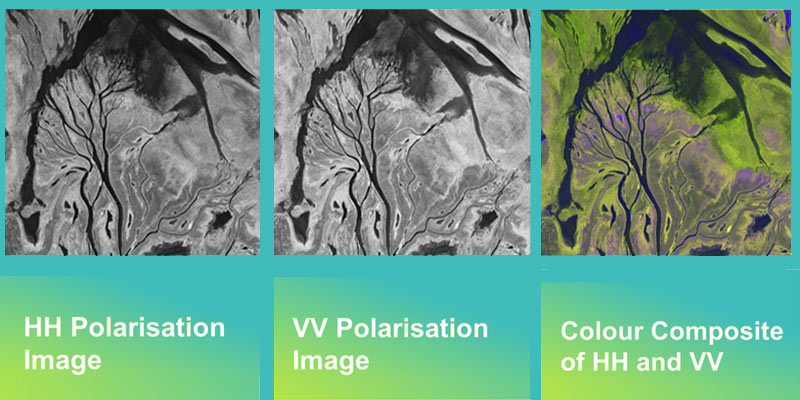
Esta imagen de la constelación de radar en modo StripMap a una resolución espacial de 3m ha sido recogida sobre el embalse de Po Yang Hu en China. Se presenta aquí en dos capas diferentes, las llamadas polarizaciones y su combinación de colores.
Recordemos el episodio 1: Los sensores de radar transmiten activamente una señal (onda electromagnética) al suelo y reciben su eco desde el suelo. Esto se hace de manera controlada - ya sea como una onda polarizada horizontal (H = izquierda a derecha) o vertical (V = arriba y abajo). Esto es comparable a una cámara de mano con filtro polarizador: Gire el filtro para bloquear ciertas porciones de la luz solar y ver el paisaje más claramente.
Cada combinación de polarización en las etapas de transmisión y recepción proporciona una imagen separada, por ejemplo, las ondas polarizadas VV interactúan con los tallos verticales de un dosel vegetal, mientras que las ondas polarizadas HH penetran a través del dosel vegetal.
Por lo tanto, la combinación de los canales de polarización resulta en una imagen de color falso, que ayuda a diferenciar entre los tipos de cobertura del suelo como la vegetación o las clases de materiales de superficie. Si bien es posible una variedad de polaridades, la imagen de hoy muestra una comparación entre tipos de polarización, única: "HH", "VV" o dual / doble: "HH / VV".
El radar puede crear imágenes con una variedad de combinaciones de polarización. Combinado, esto ayudará a delinear los tipos de cubierta terrestre y las clases de vegetación.
Episodio 7: Composición de color
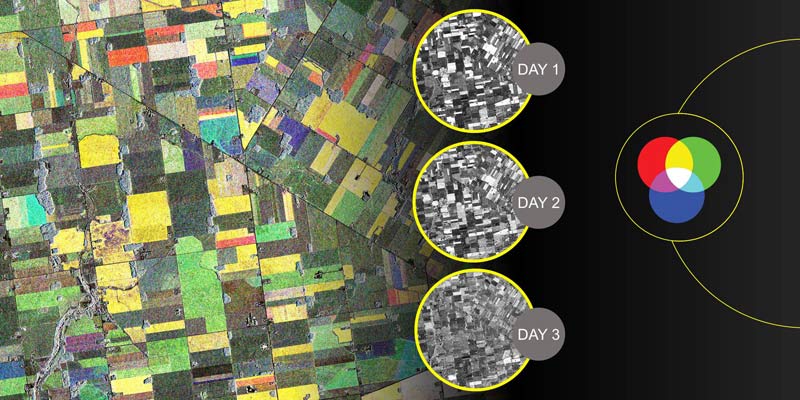
Esta imagen compuesta de color de Londres, ON, Canadá ha sido creada a partir de tres imágenes StripMap a 3m de resolución, recogidas en el área en octubre y noviembre. Cada una de estas imágenes de escala de grises ya puede ser explotado de forma bastante sustancial por sí mismo, y sin embargo, los usuarios a menudo prefieren tener información adicional y/ o fácil de acceder (color).
En una imagen óptica se puede lograr una visión general de, p. ej., cultivos/fitosanidad combinando bandas rojas, verdes e infrarrojas cercanas para crear compuestos de color. Los sensores de radar no proporcionan este tipo de información espectral. Por lo general funcionan en una banda de frecuencia preestablecida (aquí la banda X). Sin embargo, se puede crear una coloración combinando la misma imagen en diferentes polaridades o múltiples imágenes recogidas en diferentes fechas. En el ejemplo de hoy, se han recogido tres imágenes de radar en diferentes fechas (usando la polarización de HH). Posteriormente, cada una de las imágenes ha sido asignada a un canal de color individual (1ª imagen = rojo, 2ª imagen = verde, 3ª imagen = azul). Combinadas, estas imágenes dan como resultado el compuesto de color mostrado. Debido a la mezcla de color aditivo, pueden aparecer colores adicionales como amarillo, magenta, cían y blanco en la imagen - y, por supuesto, negro donde ninguna de las imágenes contiene ninguna otra información.
Las imágenes compuestas en color son especialmente valiosas para la clasificación de la cobertura terrestre. Los diferentes colores reflejan el tipo de cultivo, así como el cambio en las condiciones del cultivo durante un período definido (p. ej., crecimiento/eliminación) el período de cosecha en nuestro ejemplo.
Episodio 8: Detección de cambio de amplitud
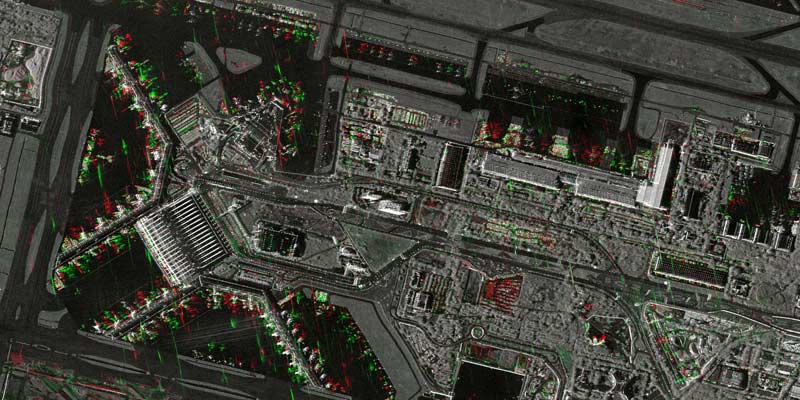
Esta imagen de Detección de Cambio de Apmplitud (ACD) del Aeropuerto Internacional Indira Gandhi de la India ha sido creada a partir de dos imágenes de Radar del modo Staring SpotLight, adquiridas en diferentes fechas y con resolución submétrica.
En el caso de ACD, se identifica un cambio basado en la retrodispersión (valor gris del píxel) entre adquisiciones repetidas; por lo tanto, una simple superposición de imágenes posteriores es suficiente para identificar cambios. Al asignar las imágenes individuales a diferentes canales de color (p. ej., verde y rojo) y generar un compuesto de color de un mínimo de dos adquisiciones diferentes, los cambios son fácilmente visibles como áreas coloreadas. Los tonos grises representan estos objetos que no han mostrado ningún cambio entre las dos observaciones.
ACD es especialmente útil para el Hotspot Monitoring con el fin de detectar cambios en objetos artificiales (p. ej., edificios, vehículos, como los aviones en la imagen actual), áreas de inundación o movimientos de masa en las laderas del terreno. Se pueden emplear métodos automatizados para ayudar al analista y detectar verdaderamente los cambios.
Los cambios estructurales entre un conjunto de adquisiciones de imagen repetidas se pueden detectar automáticamente y poner a disposición de un SIG para facilitar el acceso a la información.
Episodio 9: Detección del cambio de coherencia
Similar al Episodio 8, esta imagen de Detección del cambio de coherencia (CCD) del Aeropuerto Internacional Indira Gandhi, Nueva Delhi ha sido creada a partir de dos imágenes de Radar del modo Staring SpotLight, colectadas en un intervalo de 11 días.
El CCD es el análisis de la coherencia de la imagen de radar (o 'similitud') basado en la medición de la información de fase que se incluye en los datos de radar.
Este método muy sensible permite una detección temprana de incluso cambios sutiles no detectables de otra manera. Estos cambios no tienen que ser necesariamente basados en objetos (p. ej., la apariencia o el desmontaje de un vehículo o la demolición de un edificio), sino que también pueden ser causados por obras de tierra/terraplenes o por vehículos que utilizan un camino de grava.
Esta imagen CCD es una composición en color de dos imágenes de radar que tienen la misma geometría de visualización, así como su imagen de coherencia.
Los colores indican cambios (Verde = Día 1, Rojo = Día 2) así como objetos y superficies estables (Blanco = edificios, Negro = asfalto, Azul = concreto). Permiten obtener una rápida visión general de las actividades recientes del sitio.
El CCD basado en SAR se utiliza para detectar incluso pequeñas y sutiles diferencias entre dos o más imágenes de radar, indicando actividades sobre un área en una etapa muy temprana. También se utiliza para la segmentación y clasificación de imágenes, p.ej. por algoritmos de aprendizaje automático para ayudar a indicar los principales tipos de cubierta terrestre.

Si tienes interés en adquirir imágenes SAR para tu proyecto ¡contáctanos!